

 联系我们
联系我们

库卡。 . Remotesupportview 是为机器人控制系统提供在线支持的软件包。
组件Remote SuppportView由以下组件组成:
(1)客户端.RSV:RSV的中WorkVisual客户端实现在RSV RSV客户端可以连接到服务器,以查看或访问它们的界面。
(2) 是的。RSV服务器:RSV服务器可以在机器人控制系统或wov上执行。
(3)运作模式有以下运作模式:
-观察模式:客户端可在服务器端查看服务器动作界面/引导用户。
- 控制模式:客户端访问/控制服务器的接口。
在这两种操作模式下,多个客户端可以同时连接到服务器。客户数量没有限制。
(4).限制:
- 客户端不能在控制模式下访问 i / o 终端或移动机器人。 控制模式需要服务器端用户的同意。 客户端必须请求切换到控制模式。
(5)机器人控制系统的前提:操作方式T1。
当切换到操作模式T2,AUT或AUT EXT,自动控制模式结束并再次客户端处于观察模式。
2、 机器人控制器安装软件
1. 将 usb 接口插入机器人控制系统或 smartpad。
2.从主菜单中选择投入运行>辅助软件。
3.按新的软件:要显示在列名和列条目RemoteSupportView路径
显示驱动器e:\或K:\。如果没有,请按刷新。
4。 如果上述选项在此处显示,则进入第5步,或者必须首先配置要安装的程序的路径:
a. 按下按键配置。
在区域选项的安装路径中选择一行。
提示:如果该行已经包含了一个路径,该路径被覆盖。
c、 按路径选择。显示现有驱动器。
如果 u 盘插入机器人控制系统: 选择软件位于 e: 的目录。 如果 u 盘插入 smartpad: k: 而不是 e:
E.新闻拯救。显示区域选项的安装路径。它包含了一条新的路径。
F。选择新路径,然后按保存再行。
5个。选择entry remote support视图并按install。回答安全问题。
6. 用 ok 确认重启请求。
7. 拔出 U 盘。
8.重启机器人控制系统..
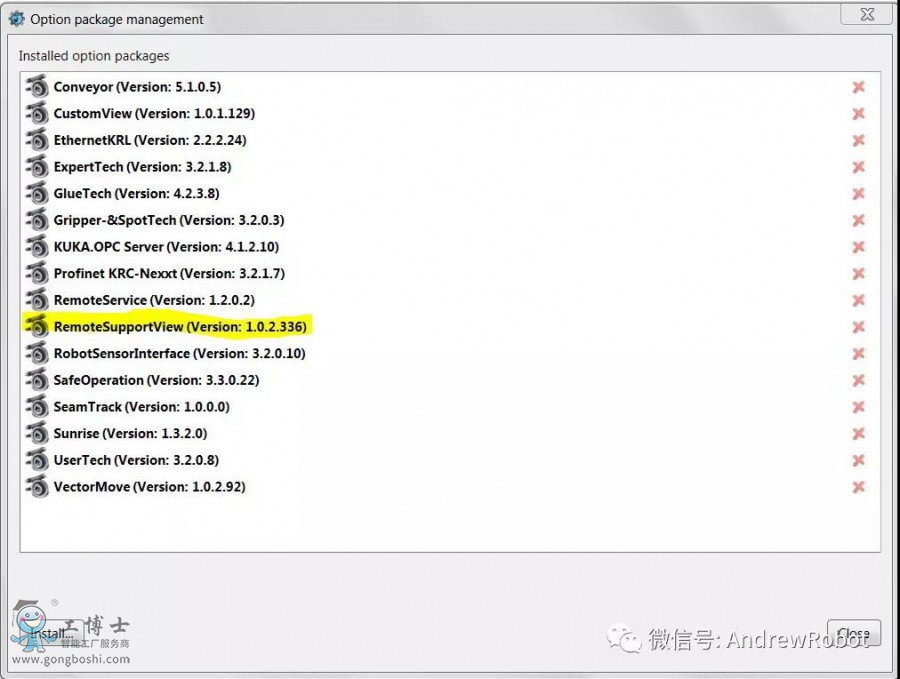
三.WOV安装RSV KOP
安装选项包remotesupportview并重新启动wov
四.测试
1. 外部 pc 通过网络线与机器人控制器的控制器连接;
2.为外部PC卡设置IP地址,以确保它们与库卡位于同一段;
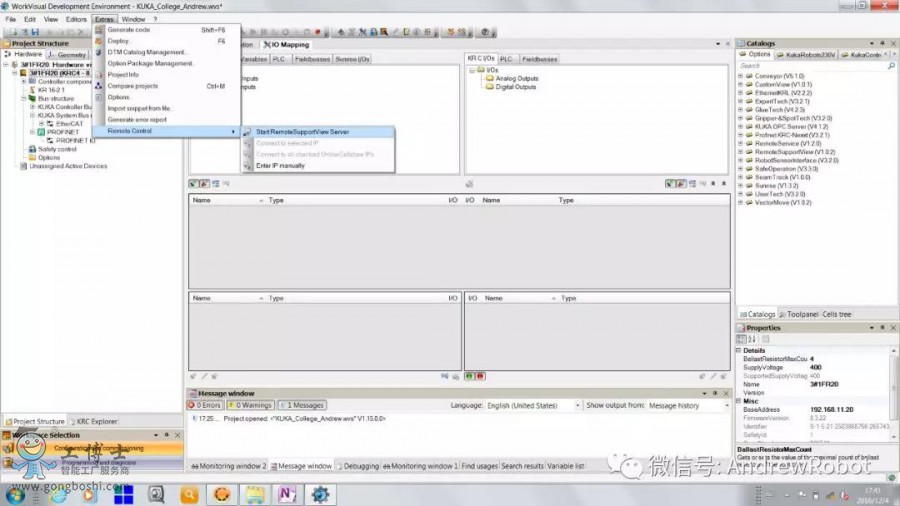
3.打开WOV通过浏览软件机器人项目并下载*新的项目;
4. Add remote start RSV server
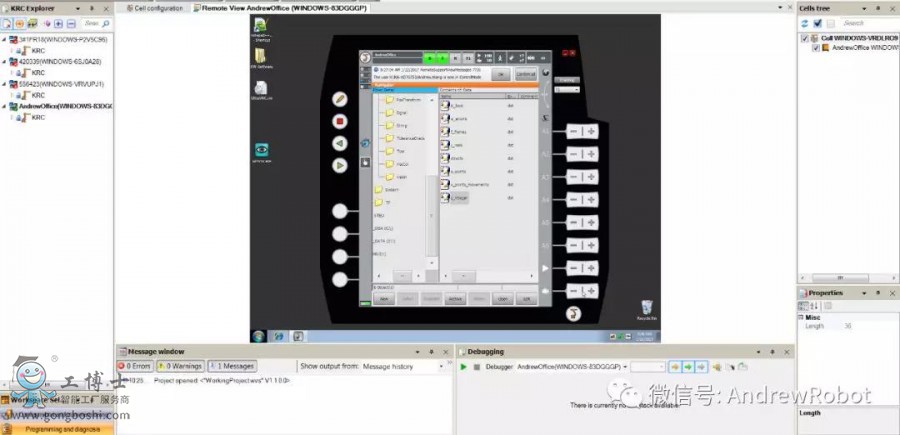
5. 利用在线功能“编程和诊断” ,一个网段将机器人扫描到正确的盒子里,此时可以选择需要连接的机器人远程连接;
来源:网络
更多资讯:库卡机器人